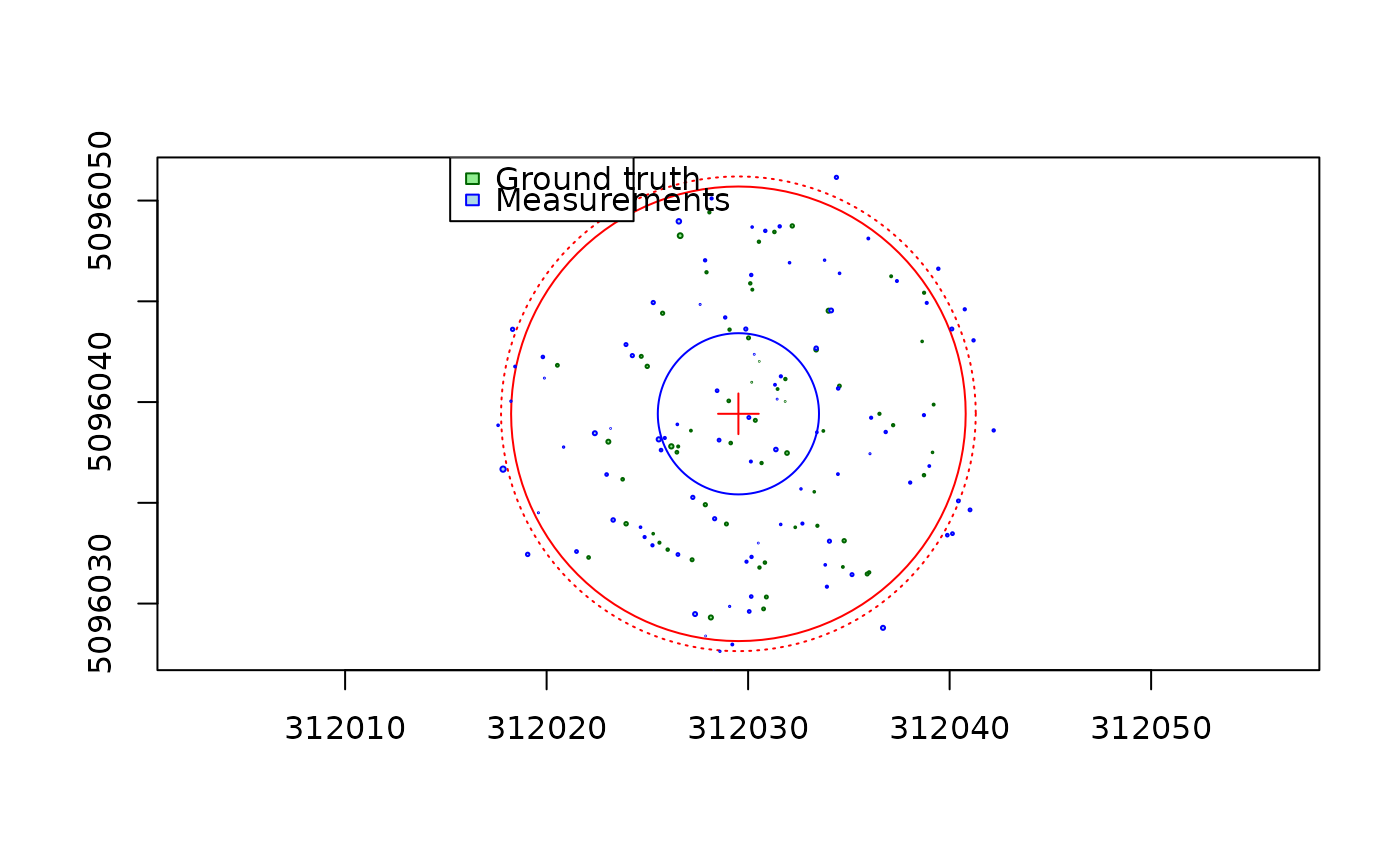
Create a TreeMapMatching object for tree pairing
make_mapmatching.RdPrepares a structured object containing inventory trees, measured trees, a center point, and a matching radius. This object is used as input for tree matching algorithms.
make_mapmatching(inventory, measured, center, radius = 11.28, buffer = 0.5)Arguments
- inventory
An `sf` object of class `"TreeMap"` representing the ground truth inventory trees.
- measured
An `sf` object of class `"TreeMap"` representing the lidar measured trees.
- center
A numeric vector of length 2 representing the X and Y coordinates of the center point.
- radius
A numeric value indicating the plot radius (in projection units). Default is 11.28.
- buffer
The radius of the plot is defined by 'radius'. Due to measurement uncertainty, some trees measured with the LiDAR may fall just outside the plot boundary. These trees are neither counted nor matched. Adding a buffer allows matching trees outside the plot without penalizing the scores if those trees remain unmatched.
Value
A `TreeMapMatching` object: a list with components:
inventory: the standardized inventory `sf` objectmeasured: the standardized measured `sf` objectcenter: an `sfc_POINT` geometry representing the centerradius: the radius used for filtering measured points
Details
Both `inventory` and `measured` must be standardized using the standardize function.
The function checks that both inputs use the same coordinate reference system (CRS).
The center point is converted into an `sf` geometry with the same CRS as the input data.
See also
Examples
data(PRF025_Field)
PRF025_Field <- standardize(
PRF025_Field,
xname = "Field_Xpj",
yname = "Field_Ypj",
zname = "DBH",
zunits = "cm",
crs = 2959)
center = c(PRF025_Field$Easting[1], PRF025_Field$Northing[1])
data(PRF025_Lidar)
PRF025_Lidar <- standardize(
PRF025_Lidar,
xname = "X",
yname = "Y",
zname = "DBH",
zunits = "m",
crs = 2959)
treemap = make_mapmatching(PRF025_Field, PRF025_Lidar, center, 11.28)
plot(treemap)